

ARMS PhD Student Zhanat Makhataeva Published her Review Paper on Augmented Reality in Robotics
“Augmented Reality for Robotics: A Review” authored by PhD Student Zhanat Makhataeva and Prof. Huseyin Atakan Varol was recently published in the journal MDPI Robotics. Augmented reality (AR) is used to enhance the perception of the real world by integrating virtual objects to an image sequence acquired from various camera technologies. The paper provides an […]
3 April 2020
Analytical Modeling and Design of Negative Stiffness Honeycombs
A paper entitled “Analytical Modeling and Design of Negative Stiffness Honeycombs” (Altay Zhakatayev, Zhanat Kappassov, Atakan Varol) was recently accepted for publication in the prestigious journal Smart Materials and Structures (IOP Science) with impact factor 3.543
23 January 2020
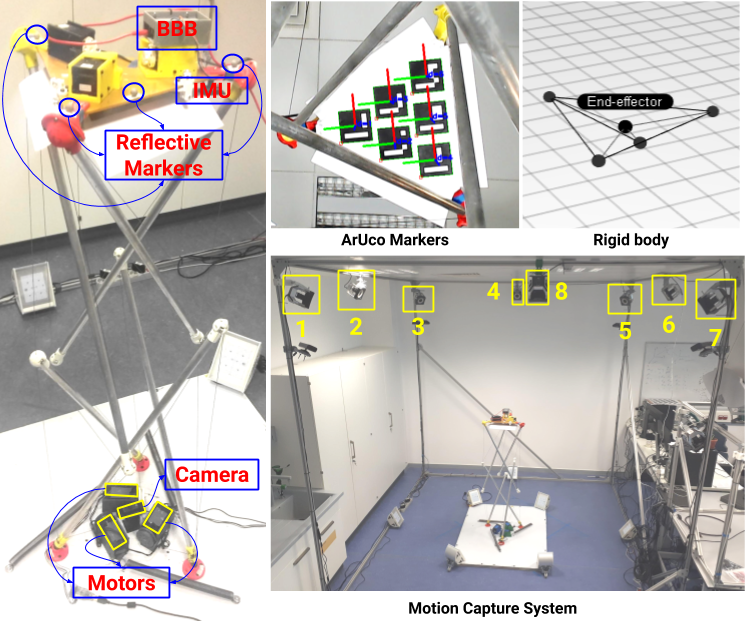
A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
In this paper, a pose estimation strategy for the end effector of a tensegrity manipulator, based on the use of an extended Kalman filter and a deep feedforward neural network with three hidden layers was presented
15 December 2019
Altay Zhakatayev Successfully Defended PhD Thesis
Altay Zhakatayev successfully defended his PhD thesis on 18 October 2019. The title of the thesis is “Optimal Design and Control of Variable Impedance Actuated Robots”. The main advantages of variable impedance actuated (VIA) robots compared to traditional position-controlled robots include safety, energy efficiency and adaptability. However, due to the presence of additional elements (such as […]
15 November 2019

ARMS Member Akmaral Moldagalieva Leaves for PhD Studies.
Akmaral Moldagalieva joined ARMS Laboratory as a graduate student in 2016. Throughout the time in ARMS Laboratory she conducted research on Computer Vision-based approaches for robot’s pose estimation challenges. She will continue her education by studying on a doctoral degree in the Department of Computer Science at Laval University (Québec, Canada). We wish her all […]
6 December 2019
ARMS Lab member took the 3rd place at IROS 2019 competition.
Congratulations to Akmaral Moldagalieva for taking the 3rd place at the “Object Pose Estimation Challenge for Bin-Picking” held at IROS 2019.
7 November 2019

Deputies of the Mazhilis Visited ARMS Lab.
On 5 October 2019, Advanced Robotics and Mechatronics (ARMS) Laboratory was visited by the deputies of the Mazhilis who were assessing the progress on the realization of the Step 63 of the “100 CONCRETE STEPS PLAN”. Among the esteemed guests wereGulshara Abdiqalyqova (Secretary of State of Kazakhstan) , Zhamilya Nurmanbetova, Abdimanap Bekturganov (Member of the […]
9 October 2019
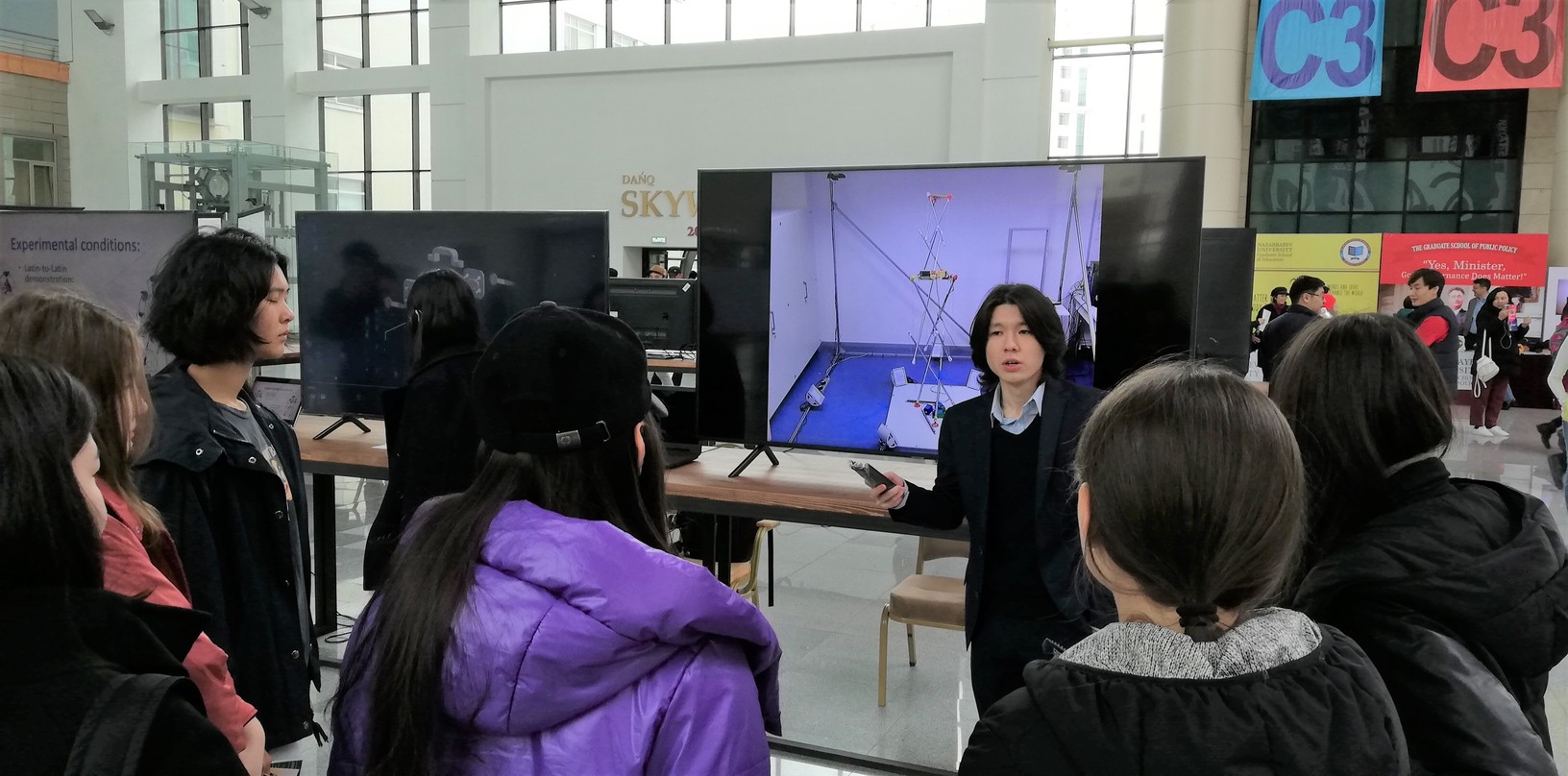
ARMS Lab Participated in the Nazarbayev University Open House.
ARMS Labs researchers Altay Zhakatayev, Akmaral Moldagalieva, Zhanat Mahataeva, Askat Kuzdeuov, Yerzhan Rzagaliyev and Kudaibergen Urinbayev and PI Dr. Atakan Varol participated in the Nazarbayev University Open House as part of the School of Engineering and Digital Sciences exhibition. In the upper atrium, ARMS researchers presented videos of their research next to the KazAeroSpace stand. […]
25 Septemper 2019
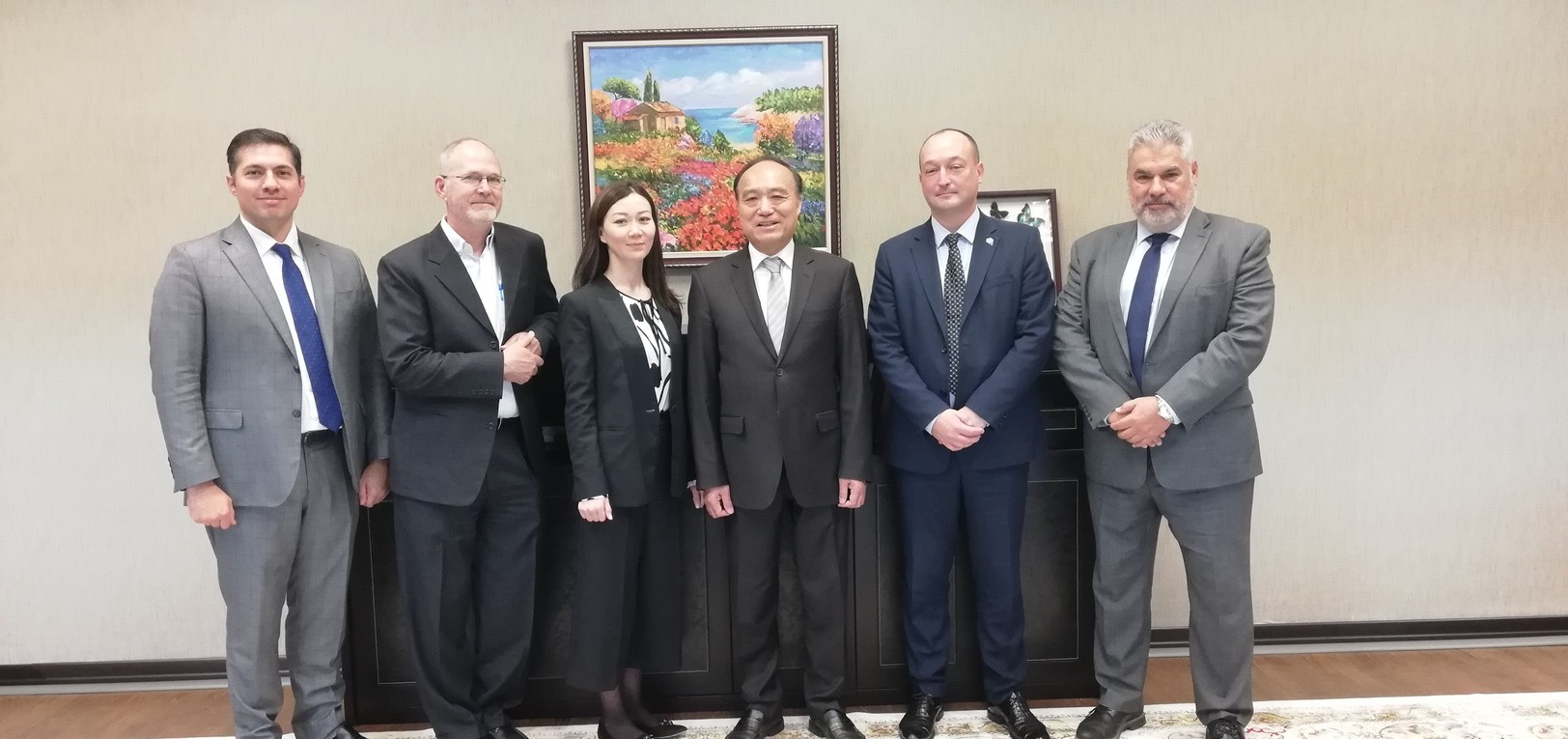
General Secretary of ITU Haolin Zhao Visited Robotics and AI Laboratories.
Secretary-General of the International Telecommunication Union (ITU) Houlin Zhao toured the Robotics and AI facilities in the C4 Research Building including ARMS, ALARIS, ISSAI, Human-Robot Interaction, and Medical AI Labs. Mr. Zhao extended a formal invitation to Nazarbayev University to become a university-member of the ITU and also asked the researchers to participate in the […]
4 August 2019

ISSAI Announced at the NU Digital Day.
Nazarbayev University conducted a series of events on 14 September 2019, Saturday to announce important new initiatives in the sphere of digital development. The event was organized in support initiatives of the Government of Kazakhstan in the field of digitalization. The day began with a panel discussion, on the topic of “The Future of AI […]
