
Variable Impedance Robots
From a hardware point of view, the main difference between variable impedance robots and traditional rigid robots is the mechanical decoupling of a link from an actuator. This decoupling can be achieved by incorporating variable stiffness and/or damping elements in between an actuator and a link. As a result, variable impedance actuated robots possess the following advantages compared to traditional robots. The first advantage is energy efficiency, which is due to the presence of nonlinear elastic elements. The second benefit is safety. As a result, variable impedance actuated robots are viewed as the main solution for physical human-robot interaction problems. The third advantage is the ability to adjust the natural dynamics of the system. However, these advantages come at a certain cost. One is the difficulty of design. Due to the presence of nonlinear stiffness and/or damping elements, variable impedance actuated robots have more complicated and non-intuitive design compared to traditional stiff robots. Another disadvantage is the control problem. Nonlinear dynamics and complicated design make control aspects of variable impedance actuated robots difficult to implement with traditional control methods, such as PID control. Moreover, intuitive tuning of a controller settings does not guarantee the desired performance, system robustness, and utilization of the system to its full potential. Therefore, our research is focused on design and control of variable impedance/stiffness robots.

All Publications
Sensor Reduction of Variable Stiffness Actuated Robots Using Moving Horizon Estimation.
Adiyatov, O.; Rakhim, B.; Zhakatayev, A.; and Varol, H. A.
Energy-Aware Optimal Control of Variable Stiffness Actuated Robots.
Zhakatayev, A.; Rubagotti, M.; and Varol, H. A.
IEEE Robotics and Automation Letters, 4(2): 330-337. April 2019.
Safety Aura Visualization for Variable Impedance Actuated Robots.
#No #keywords
Makhateva, Z.; Zhakatayev, A.; and Varol, H. A.Jan 2019. In 2019 IEEE/SICE International Symposium on System Integration (SII)
Computer Vision-Based Pose Estimation of Tensegrity Robots Using Fiducial Markers.
#No #keywords
Moldagalieva, A.; Fadeyev, D.; Kuzdeov, A.; Khan, V.; Alimzhanov, B.; and Varol, H. A.Jan 2019. In 2019 IEEE/SICE International Symposium on System Integration (SII)
Optimal Sensor Placement of Variable Impedance Actuated Robots.
#No #keywords
Rakhim, B.; Zhakatayev, A.; Adiyatov, O.; and Varol, H. A.Jan 2019. In 2019 IEEE/SICE International Symposium on System Integration (SII)
Successive linearization based model predictive control of variable stiffness actuated robots.
Zhakatayev, A.; Rakhim, B.; Adiyatov, O.; Baimyshev, A.; and Varol, H. A.
Time-Optimal Control of Variable-Stiffness-Actuated Systems.
Zhakatayev, A.; Rubagotti, M.; and Varol, H. A.
IEEE/ASME Transactions on Mechatronics, 22(3): 1247-1258. June 2017.
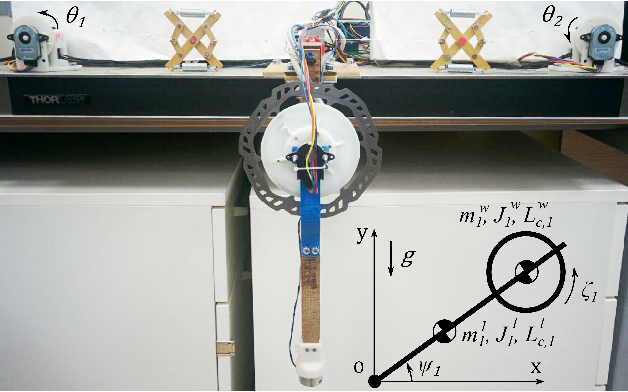
Augmenting Variable Stiffness Actuation Using Reaction Wheels.
Baimyshev, A.; Zhakatayev, A.; and Varol, H. A.
A preliminary study for using reactive braking torque in variable impedance actuation.
Zhakatayev, A.; Baimyshev, A.; and Varol, H. A.
2015 IEEE/SICE International Symposium on System Integration (SII), pages 754-759, Dec 2015.
Integrated optimal design and control of variable stiffness actuated robots.
Zhakatayev, A.; Rubagotti, M.; and Varol, H. A.
2015 European Control Conference (ECC), pages 1100-1105, July 2015.
Closed-Loop Control of Variable Stiffness Actuated Robots via Nonlinear Model Predictive Control.
Zhakatayev, A.; Rubagotti, M.; and Varol, H. A.
