
Tensegrity Robotics
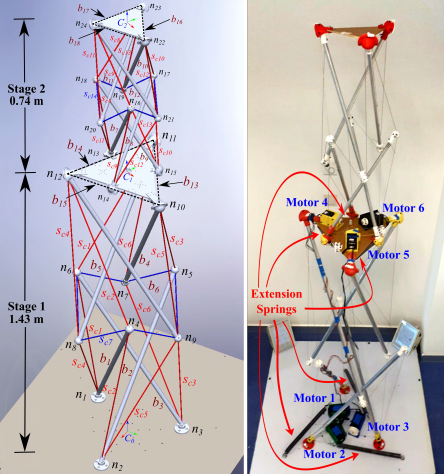
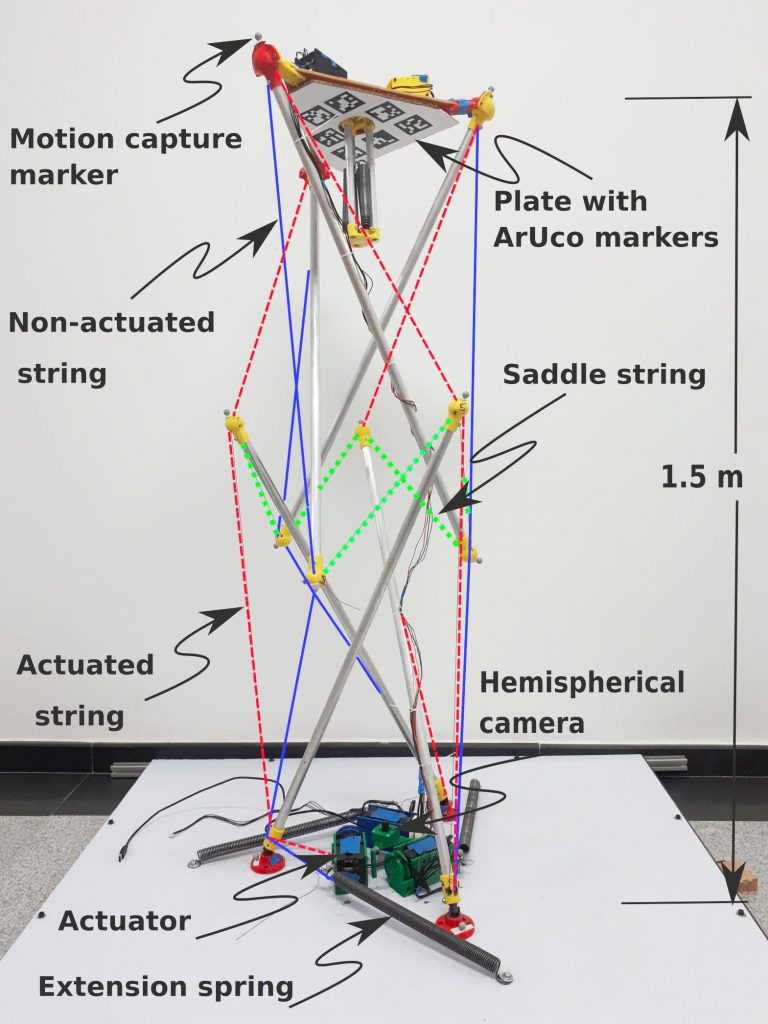
Tensegrity is a spatial structure composed of a set of axially loaded compression elements (also called as the bars and struts) held isolated from each other by means of continuous tensile elements (the strings). The shape of the tensegrity is maintained by the balance between compression and tensile forces of the bars and strings. Since no element experiences bending or shear forces, the tensegrity allows lightweight and strong designs.
All Publications
Generalized Dynamics of Stacked Tensegrity Manipulators.
#dynamics #mathematical #model #bars #actuators #manipulator #dynamics #nonlinear #dynamical #systems
Fadeyev, D.; Zhakatayev, A.; Kuzdeuov, A.; and Varol, H. A.Robotic Assembly Planning of Tensegrity Structures.
Nurimbetov, B.; Issa, M.; and Varol, H. A.
2019 IEEE/SICE International Symposium on System Integration (SII)
Robotic Assembly Planning of Tensegrity Structures.
Nurimbetov, B.
