Related News
- ARMS PhD Student Zhanat Makhataeva Published her Review Paper on Augmented Reality in Robotics
- Analytical Modeling and Design of Negative Stiffness Honeycombs
- A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
- Altay Zhakatayev Successfully Defended PhD Thesis
- ARMS Member Akmaral Moldagalieva Leaves for PhD Studies.
- ARMS Lab member took the 3rd place at IROS 2019 competition.
- Deputies of the Mazhilis Visited ARMS Lab.
- ARMS Lab Participated in the Nazarbayev University Open House.
- General Secretary of ITU Haolin Zhao Visited Robotics and AI Laboratories.
- ISSAI Announced at the NU Digital Day.
First Data Science Paper of ARMS Lab is Published.
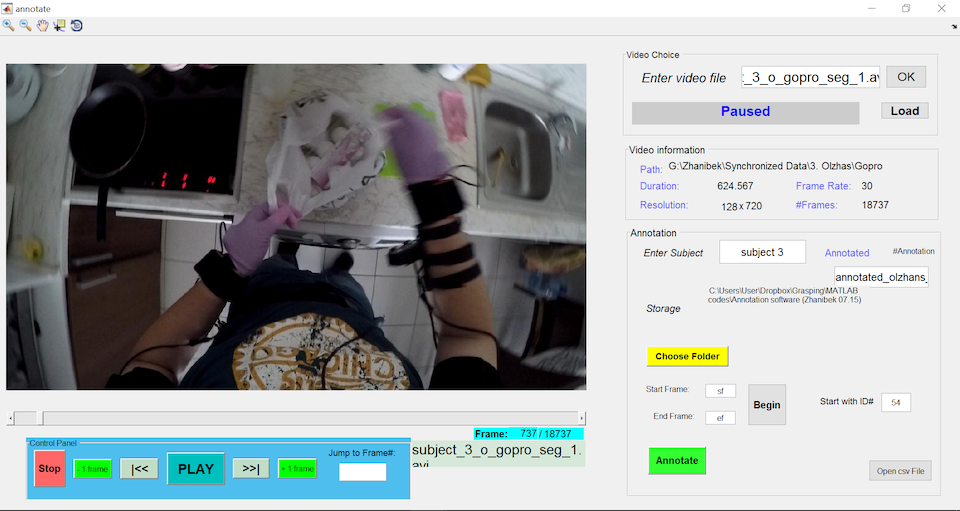
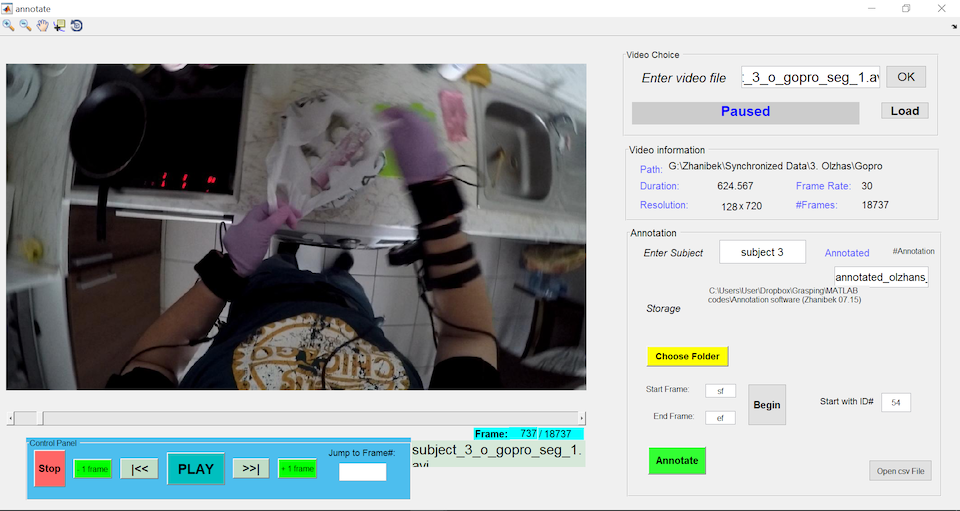
The first dataset paper (https://www.nature.com/articles/sdata2018101) [1] of ARMS Lab was published in the Scientific Data published by the prestigious Nature Publishing Group. The work presents the first grasping database collected from multiple human subjects for activities of daily living in unstructured environments. The main strength of this database is the use of three different sensing modalities: color images from a head-mounted action camera, distance data from a depth sensor on the dominant arm and upper body kinematic data acquired from an inertial motion capture suit.
The 172 GB dataset can be accessed at https://figshare.com/s/39016199b923a370fed2 .
The open-source annotation software can be downloaded from https://github.com/zhanibekrysbek/Annotation-software-of-Human-Grasping-Database.