
Related News
- ARMS PhD Student Zhanat Makhataeva Published her Review Paper on Augmented Reality in Robotics
- Analytical Modeling and Design of Negative Stiffness Honeycombs
- A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
- Altay Zhakatayev Successfully Defended PhD Thesis
- ARMS Member Akmaral Moldagalieva Leaves for PhD Studies.
- ARMS Lab member took the 3rd place at IROS 2019 competition.
- Deputies of the Mazhilis Visited ARMS Lab.
- ARMS Lab Participated in the Nazarbayev University Open House.
- General Secretary of ITU Haolin Zhao Visited Robotics and AI Laboratories.
- ISSAI Announced at the NU Digital Day.
A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
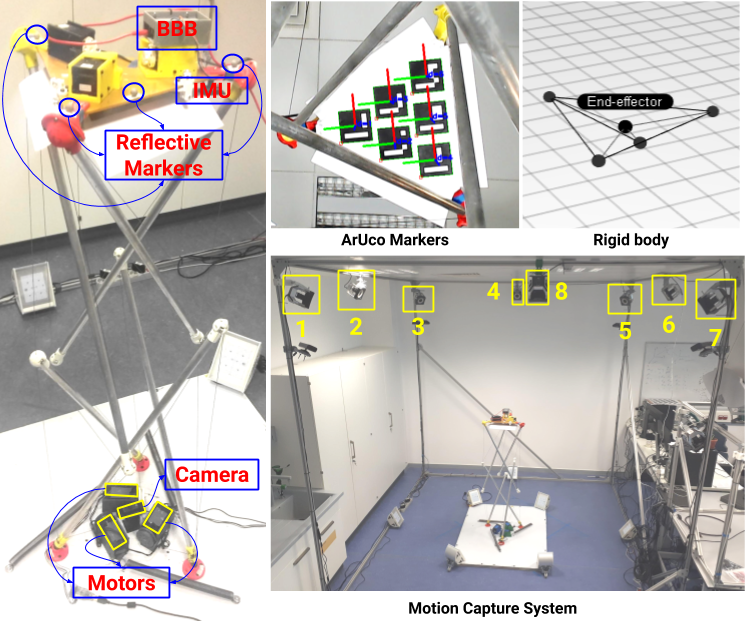
A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” (Askat Kuzdeuov, Matteo Rubagotti, Atakan Varol) was recently accepted for publication in the journal IEEE Sensors.
In this paper, a pose estimation strategy for the end effector of a tensegrity manipulator, based on the use of an extended Kalman filter and a deep feedforward neural network with three hidden layers was presented. The scheme is based on the fusion of sensor data obtained from an inertial measurement unit and ArUco fiducial markers. The method was implemented on a six bar tensegrity prism manipulator, tested using ground truth acquired from an external vision-based motion capture system, and compared with other estimation methods. The experimental results have shown the ability of our method to provide reliable pose estimates, also dealing with the problems caused by the tensegrity structure, including marker occlusions due to the presence of bars and strings.
