
Related News
- ARMS PhD Student Zhanat Makhataeva Published her Review Paper on Augmented Reality in Robotics
- Analytical Modeling and Design of Negative Stiffness Honeycombs
- A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
- Altay Zhakatayev Successfully Defended PhD Thesis
- ARMS Member Akmaral Moldagalieva Leaves for PhD Studies.
- ARMS Lab member took the 3rd place at IROS 2019 competition.
- Deputies of the Mazhilis Visited ARMS Lab.
- ARMS Lab Participated in the Nazarbayev University Open House.
- General Secretary of ITU Haolin Zhao Visited Robotics and AI Laboratories.
- ISSAI Announced at the NU Digital Day.
A Paper Base on Synthetic Dataset and Deep Learning Got Published on MDPI Machine Learning and Knowledge Extraction Journal
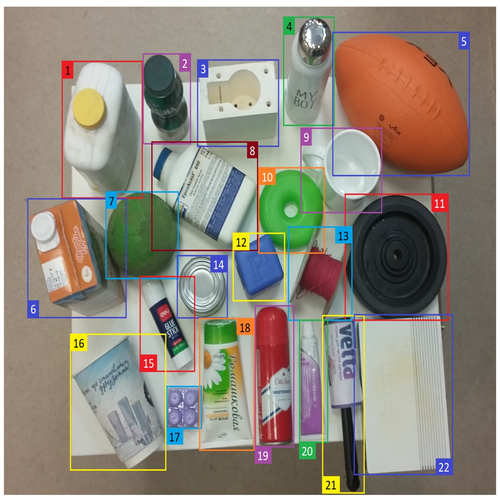
The paper titled “Deep Learning Based Objection Recognition Using Physically-Realistic Synthetic Depth Scenes” (Baimukashev, D.; Zhilisbayev, A.; Kuzdeuov, A.; Oleinikov, A.; Fadeyev, D.; Makhataeva, Z.; Varol, H.A.) was recently accepted for publication on Machine Learning and Knowledge Extraction, MDPI journal.
In this study, a deep object recognition framework using synthetic depth image dataset was developed and validated. The developed framework can be trained on synthetically generated depth data and then be employed on a real depth dataset in a cluttered environment for object detection. This has the potential to substantially decrease the time and human effort required for the extensive data collection and labeling.
