
Related News
- ARMS PhD Student Zhanat Makhataeva Published her Review Paper on Augmented Reality in Robotics
- Analytical Modeling and Design of Negative Stiffness Honeycombs
- A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
- Altay Zhakatayev Successfully Defended PhD Thesis
- ARMS Member Akmaral Moldagalieva Leaves for PhD Studies.
- ARMS Lab member took the 3rd place at IROS 2019 competition.
- Deputies of the Mazhilis Visited ARMS Lab.
- ARMS Lab Participated in the Nazarbayev University Open House.
- General Secretary of ITU Haolin Zhao Visited Robotics and AI Laboratories.
- ISSAI Announced at the NU Digital Day.
A paper was accepted for IEEE Transactions on Control Systems Technology journal
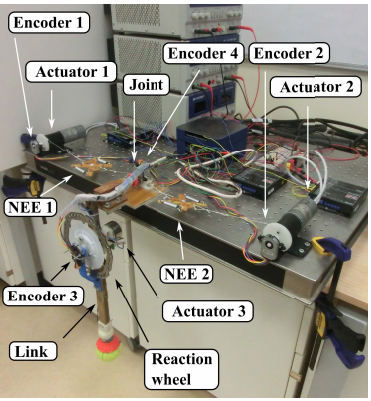
Recently a paper entitled “Sensor Reduction of Variable Stiffness Actuated Robots Using Moving Horizon Estimation” (Olzhas Adiyatov, Bexultan Rakhim, Altay Zhakatayev, Huseyin Atakan Varol) was accepted for publication on the journal IEEE Transactions on Control Systems Technology.
The main idea of the paper is to use moving horizon estimation (MHE) techniques to estimate the full state of the variable stiffness actuated (VSA) robotic system. This allows to reduce the number of sensors required for the closed loop control of the VSA robot using model predictive control (MPC). Using simulations and real world experiments, it was shown that MHE and MPC based control and estimation framework enables sensor reduction of VSA systems without compromising their performance.
