
Related News
- ARMS PhD Student Zhanat Makhataeva Published her Review Paper on Augmented Reality in Robotics
- Analytical Modeling and Design of Negative Stiffness Honeycombs
- A paper entitled “Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators” was recently accepted for publication in the journal IEEE Sensors
- Altay Zhakatayev Successfully Defended PhD Thesis
- ARMS Member Akmaral Moldagalieva Leaves for PhD Studies.
- ARMS Lab member took the 3rd place at IROS 2019 competition.
- Deputies of the Mazhilis Visited ARMS Lab.
- ARMS Lab Participated in the Nazarbayev University Open House.
- General Secretary of ITU Haolin Zhao Visited Robotics and AI Laboratories.
- ISSAI Announced at the NU Digital Day.
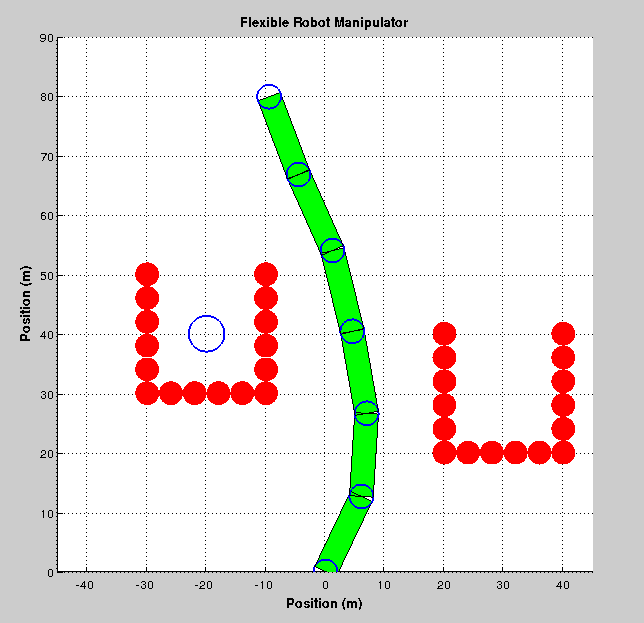
ARMS Lab Launches Matlab Toolset for the RRT*FN Algorithm
Sampling based motion planning algorithm, Rapidly Exploring Random Trees, has been a hot research topic in the last decade. Recently researchers introduced a probabilistically optimal version of the RRT algorithm called RRT*. ARMS Lab researchers, Olzhas Adiyatov and Atakan Varol, developed a memory efficient variant of RRT* motion planning algorithm. To allow the usage and benchmarking of the RRT*FN for various problems in robotics and mechatronics, ARMS Lab launches a Matlab toolset. The package also allows the usage of the traditional RRT and RRT* algorithms as well. Multiple demo problems are included in the package to provide users example to implement the algorithm for their own research problems. For more information and download, please visit the RRT*FN page.

