










News

Analytical Modeling and Design of Negative Stiffness Honeycombs
Latest Publications
Augmented Reality for Robotics: A Review
Zhanat Makhataeva, Huseyin Atakan Varol
Analytical Modeling and Design of Negative Stiffness Honeycombs
Altay Zhakatayev, Zhanat Kappassov, Huseyin Atakan Varol
https://iopscience.iop.org/article/10.1088/1361-665X/ab773a
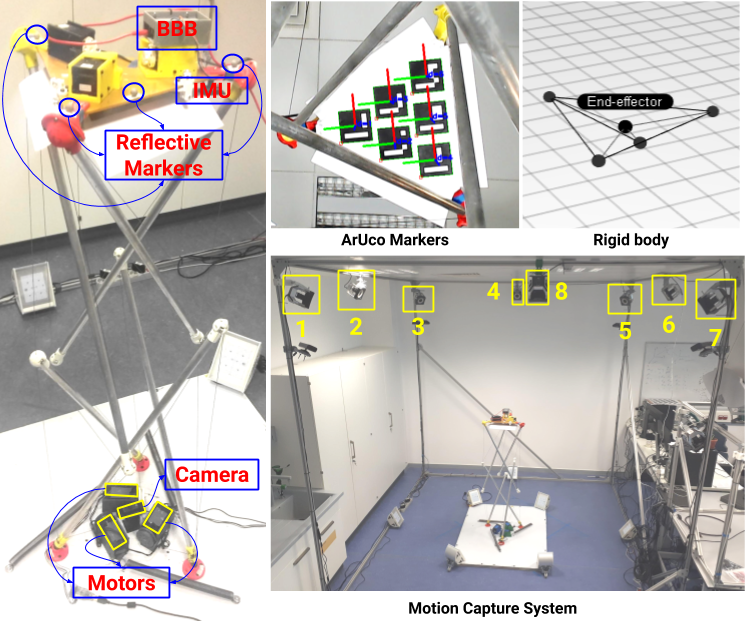
Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators
Askat Kuzdeuov ; Matteo Rubagotti ; Huseyin Atakan Varol
Neural Network Augmented Sensor Fusion for Pose Estimation of Tensegrity Manipulators
Deep Learning Based Object Recognition Using Physically-Realistic Synthetic Depth Scenes.
Baimukashev, D.; Zhilisbayev, A.; Kuzdeuov, A.; Oleinikov, A.; Fadeyev, D.; Makhataeva, Z.; and Varol, H. A.
Machine Learning and Knowledge Extraction, 1(3): 883–903. 2019.
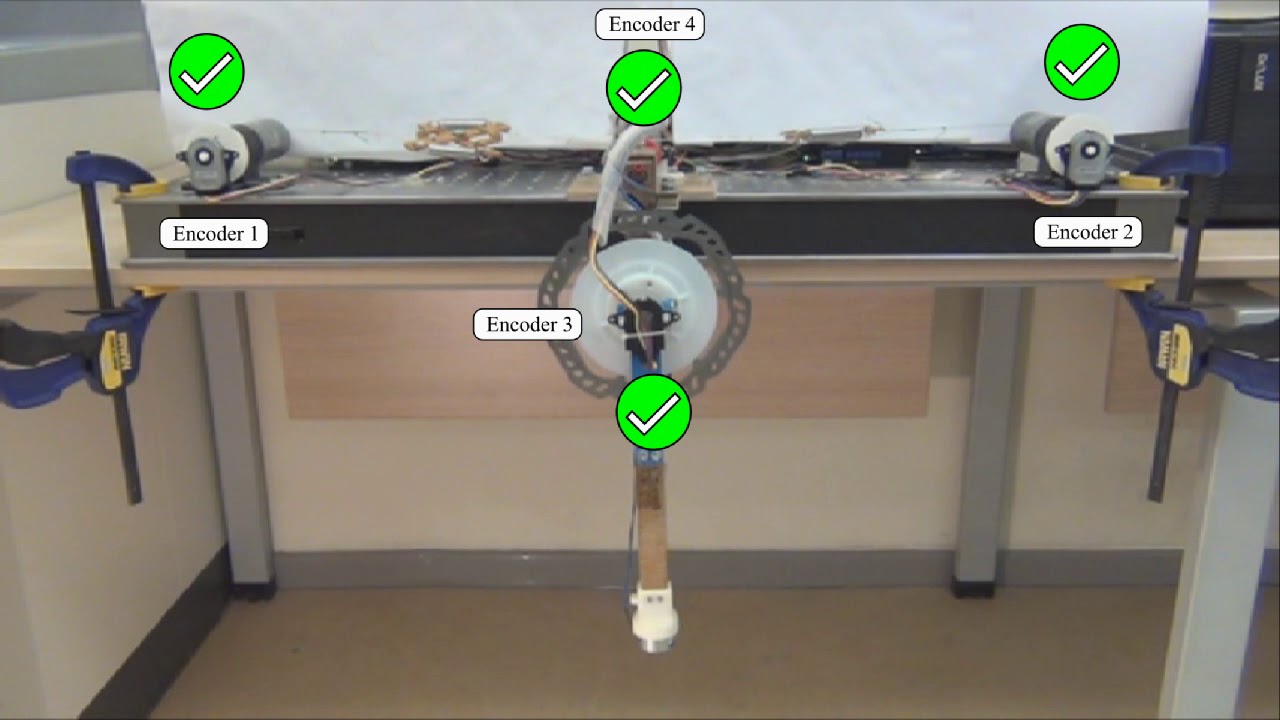
Sensor Reduction of Variable Stiffness Actuated Robots Using Moving Horizon Estimation.
Adiyatov, O.; Rakhim, B.; Zhakatayev, A.; and Varol, H. A.
Deformable Object Recognition Using Proprioceptive and Exteroceptive Tactile Sensing.
Mazhitov, A.; Adilkhanov, A.; Massalim, Y.; Kappassov, Z.; and Varol, H. A.
Jan 2019. In 2019 IEEE/SICE International Symposium on System Integration (SII)
Explore ARMS Research
Tensegrity Robotics
Learn more >>Tensegrity is a spatial structure composed of a set of axially loaded compression elements (also called as the bars and struts) held isolated from each other by means of continuous tensile elements (the strings). The shape of the tensegrity is maintained by the balance between compression and tensile forces of the bars and strings. Since […]
Augmented Reality
Learn more >>Augmented Reality (AR) turns the environment around into digital platform placing virtual objects in the real world, in real-time. AR fits into a variety of uses including gaming, digital retail, navigation, design. Our research group is utilizing AR to estimate the “safety aura” around the robot which can contribute to make the interaction between the […]
Variable Impedance Robots
Learn more >>From a hardware point of view, the main difference between variable impedance robots and traditional rigid robots is the mechanical decoupling of a link from an actuator. This decoupling can be achieved by incorporating variable stiffness and/or damping elements in between an actuator and a link. As a result, variable impedance actuated robots possess the […]
Machine Learning
Learn more >>Machine Learning (ML) builds a mathematical model based on a “training data” in order to make predictions or decisions to perform some specific task.The powerful combination of robots and machine learning enables entirely new possibilities.
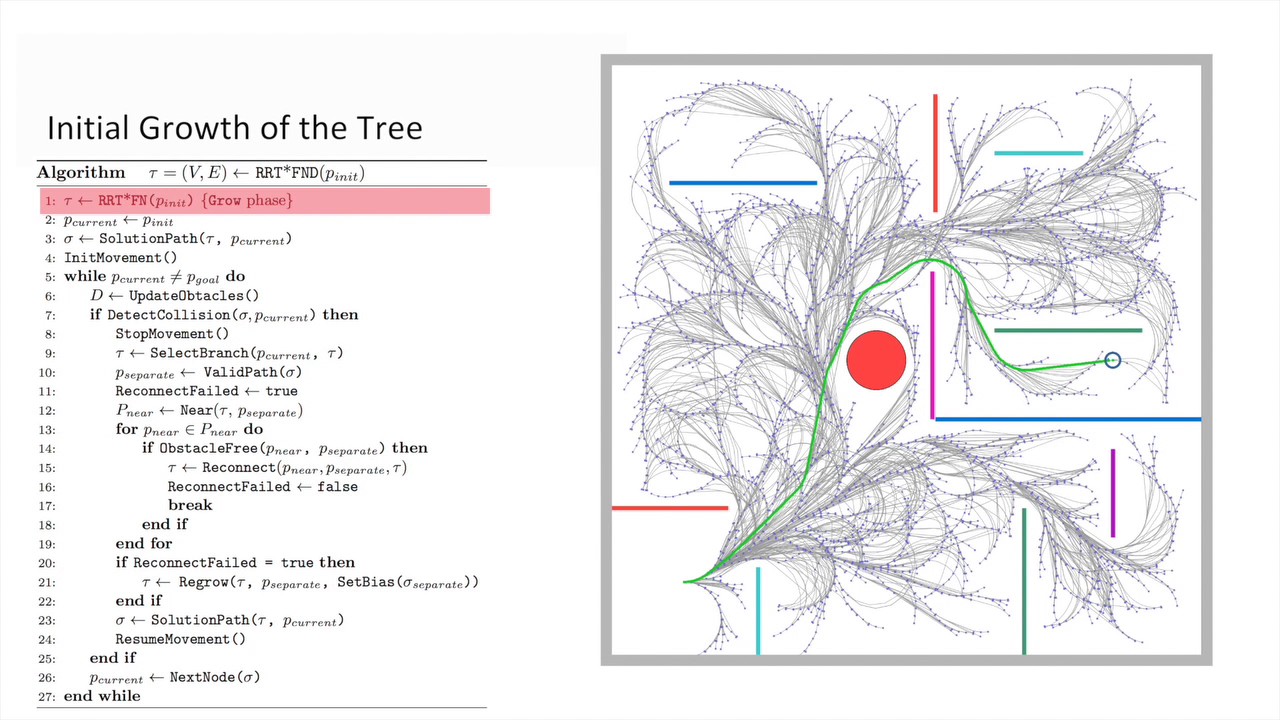
Motion Planning
Learn more >>Motion Planning is known also as navigation planning. With the robots getting ubiquitous, effective motion planning in complex environments with dynamic obstacles is becoming essential. Motion planning aims to find a sequence of discrete robot configurations from the initial to the goal state complying with constraints imposed by the environment and internal dynamics of the […]
Healthcare
Learn more >>Rehabilitation robots, surgery robots are types of medical robots used for the health care institution. Medical robots play a vital role in performing complex tasks that require brief attention to every detail. ARMS lab conducts research on the design and implementation of intelligent devices and algorithms with an emphasis on rehabilitation applications.
